加载中
九州空间
6833 (JZ-WL1)
详细说明
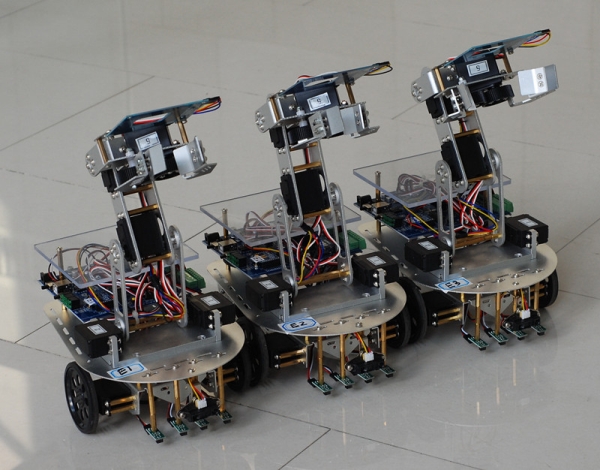
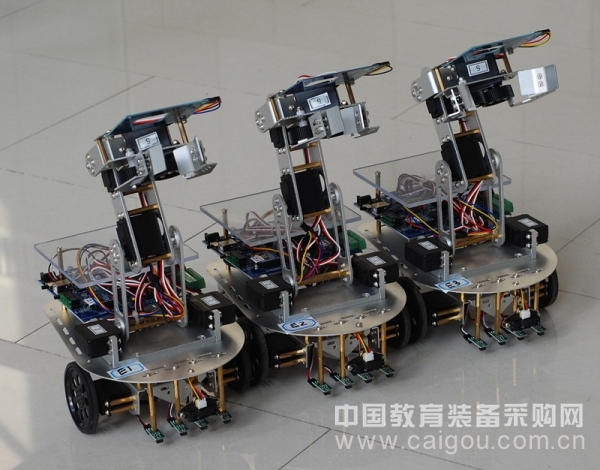
小型物流机器人系统 JZ-WL1
一、小型物流机器人系统概述
重要技术点:物联网,Zigbee,RFID,机械手,多线程
二、物流机器人系统技术参数
1.机器人套件技术参数
1)Openduino机器人控制器:
CPU:采用Atmega328p;32KB的Flash和512KB的SRAM;工作频率16MHz;
控制器尺寸:长130mm*宽120mm;
机器人控制器提供开发通讯组网的静态库,云端数据库可以自主开发和拓展;
2)移动机械手:
采用四自由度机械手实现物料的自动抓取和姿态控制;
机械手大臂长为80mm,小臂长为90mm,手臂长(含手爪)长为113.7mm;机器人宽为168.3mm,总长不大于467.7mm,高不大于402mm;
机械手手爪上方安装RFID读卡器,读卡器与机器人控制器之间采用串口通讯。
3)机器人套件的传感模块:
a、机器人红外避障传感器:1个,的有效检测距离为10cm~80cm。
b、循迹传感器:少安装4个,中间两个循迹传感器水平间距不能小于20mm,外侧两个水平间距不能小于70mm,与被检测面距离不大于7mm。
4)通讯模式:
几个机器人套件通讯采用Zigbee无线组网,2.4GHz频段,通信速率达250Kbps,室内传输距离达100m;
2.货架单元:
1)每个物流货架单元有6个存储位置,按照2列3层排列;
2)每个存储位置长160mm,宽70mm,高100mm。
3.贴有电子标签的物料:
1)圆柱形物料的直径为40mm,高为45mm;
2)顶部贴有RFID标签卡,工作频率为125KHz,读卡有效距离为50mm。
4.仓库场地:
1)物流仓库场地设计为白色底,黑色轨迹,长为3000mm,宽为1500mm。
2)适用环境:-40~85℃。
三、物流机器人系统主要特点
1. 可根据应用需要选择机器人数量
2. 控制模块和通讯模块完全标准化
3. 机械手灵活控制
4. 可扩展不同的循线传感器和防撞传感器
5. 可配置不同网络结构
四、物流机器人系统配置表
|
序号
|
名称
|
型号
|
小配置
|
标准配置
|
描述
|
|
1
|
机器人
|
机器人个体
|
|
1
|
3
|
带机械手的机器人平台
|
|
循线传感器
|
|
4
|
12
|
用来循线
|
|
Zigbee模块套件
|
JZ-S32409
|
2
|
4
|
协调器和终端
|
|
RFID读卡器
|
|
1
|
3
|
读取电子标签卡
|
|
Sharp红外测距传感器
|
|
1
|
3
|
避障
|
|
2
|
仓库场地
|
|
1
|
1
|
白色底,黑色轨迹
|
|
3
|
物料
|
|
6
|
18
|
贴有电子标签
|
|
4
|
货架单元
|
|
1
|
3
|
6~18个仓位
|