韩国Allegro Hand四指灵巧手凭借四指和十六个独立的扭矩控制关节,它是抓握和操纵研究的完美平台。
特征
?Allegro Hand灵巧手轻巧便携的拟人设计
?Allegro Hand灵巧手低成本灵巧手操作,适用于研究和工业
?Allegro Hand灵巧手多种即用型抓取算法,能够处理各种对象几何形状
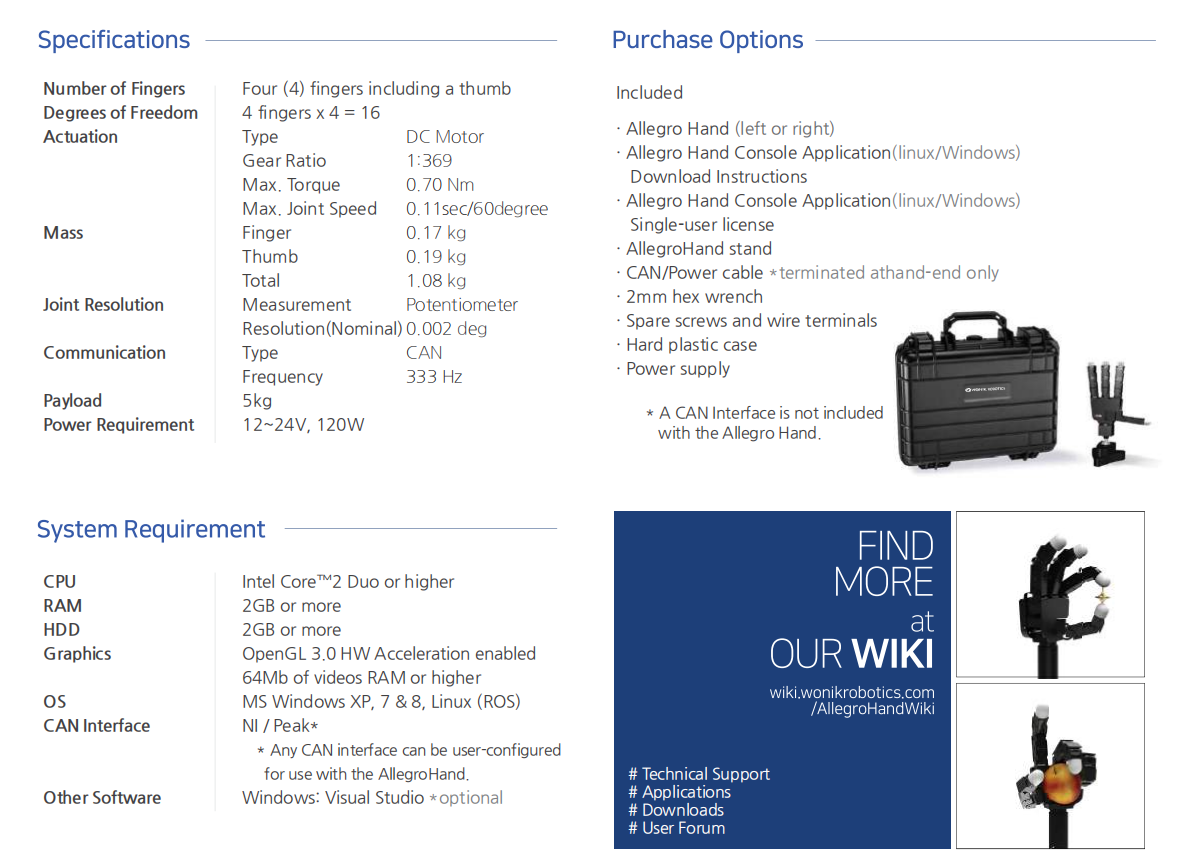
?Allegro Hand灵巧手能够负载5公斤
?16个独立的扭矩控制接头(4个手指x 4)
?Allegro Hand Application Studio包含用于基于仿真的算法原型设计和硬件测试
?Allegro Hand灵巧手支持实时控制和在线模拟