描述
我们基于开源技术的新型 6 轴协作机器人,创造Ned2,专为教育、职业培训和研究而设计。
Niryo希望使机器人技术大众化。
通过 Niryo One,许多学校已经能够让他们的学生直接使用 6 轴机器人学习机器人技术和工业 4.0,
该机器人是开源的且设计类似于工业机器人。Niryo One 还被许多研发实验室 用于测试协作机器人的新用途。
2020年底Niryo推出了Ned,在原来的One基础上做了改进。
现在来看看它的继任者 Ned2,它有更多改进。
概念
Ned2 旨在以 0.5 毫米的精度和可重复性,实现所需的所有运动。
Ned2 的铝结构使其坚固和光滑,使其能够流畅地完成机器人项目所需的运动。
该协作机器人利用了Raspberry Pi 4的能力,配备64 位 ARM V8 高性能处理器、2Gb RAM和改进的连接性。
Ned2 是一个基于Ubuntu 18.04和ROS(机器人操作系统)Melodic的协作机器人,这是一种为机器人技术创建的开源解决方案。通过 ROS,Ned2 拥有多个库,允许您构思从简单到复杂的许多程序,然后以灵活的方式响应您的需求。
用途
使用 Ned2 进行教育和研究意味着拥有一个使用忠实于工业现实的协作机器人:
对简单的流程使用可视化编程方法(Blockly,类似于 Scratch),
创建您自己的程序,允许您创建复杂的流程,例如为多机器人制作的程序或需要使用人工智能来实现视觉的程序。
原型完整的工业场景,如“pick & place”(拿起一个物体来移动它),“pick & pack”(拿起一个物体并将其插入包装中)……
生态系统
Ned2 非常适合我们为工业 4.0设计的生态系统:
该输送带可以让你原型生产线,可与机器人或自主控制。
该愿景设定及其在手腕相机会给斯内德与它与环境相互作用的能力图像识别。设置您的工作空间并使用工业 4.0。**的图像处理功能。
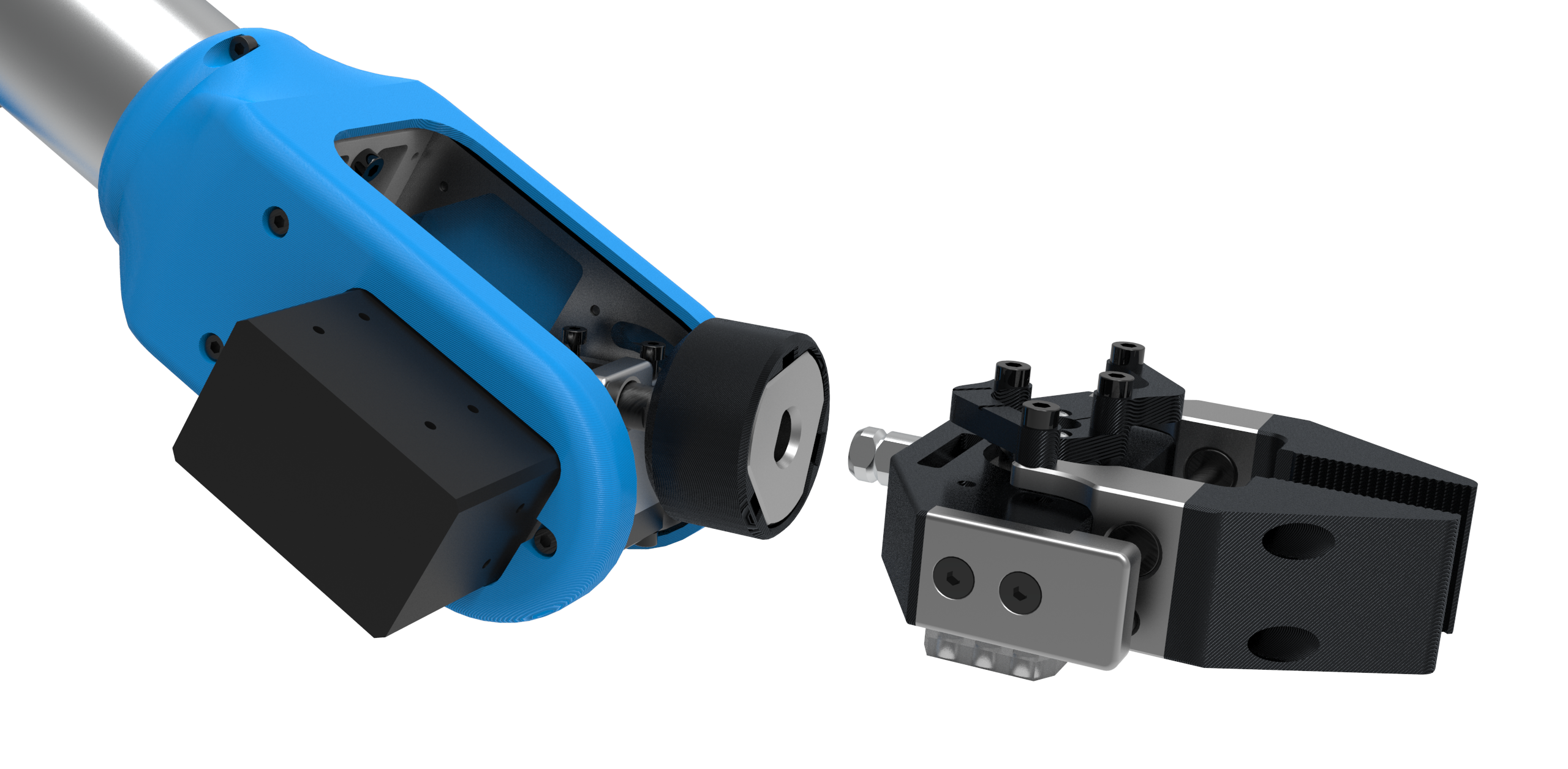
工具
Ned2 带有一个自定义抓手,它允许您操纵许多不同的对象。它的标准钳口可让您捕捉许多中等大小的物体,并且可以根据您的选择进行更换:
● 夹爪包(不包括在内),由 3 组不同的夹爪(XL、Flat、Precision)组成,可让您操作新类型的物体。
● 如果您拥有 3D 打印机,您可以创建自己的钳口以匹配您的项目。
使用 EasyCo
nnect 系统,更换工具从未如此简单:只需几秒钟,Ned 就能够操纵新对象(使用真空泵、大型夹具、自适应夹具和电磁铁)(不包括在内)。
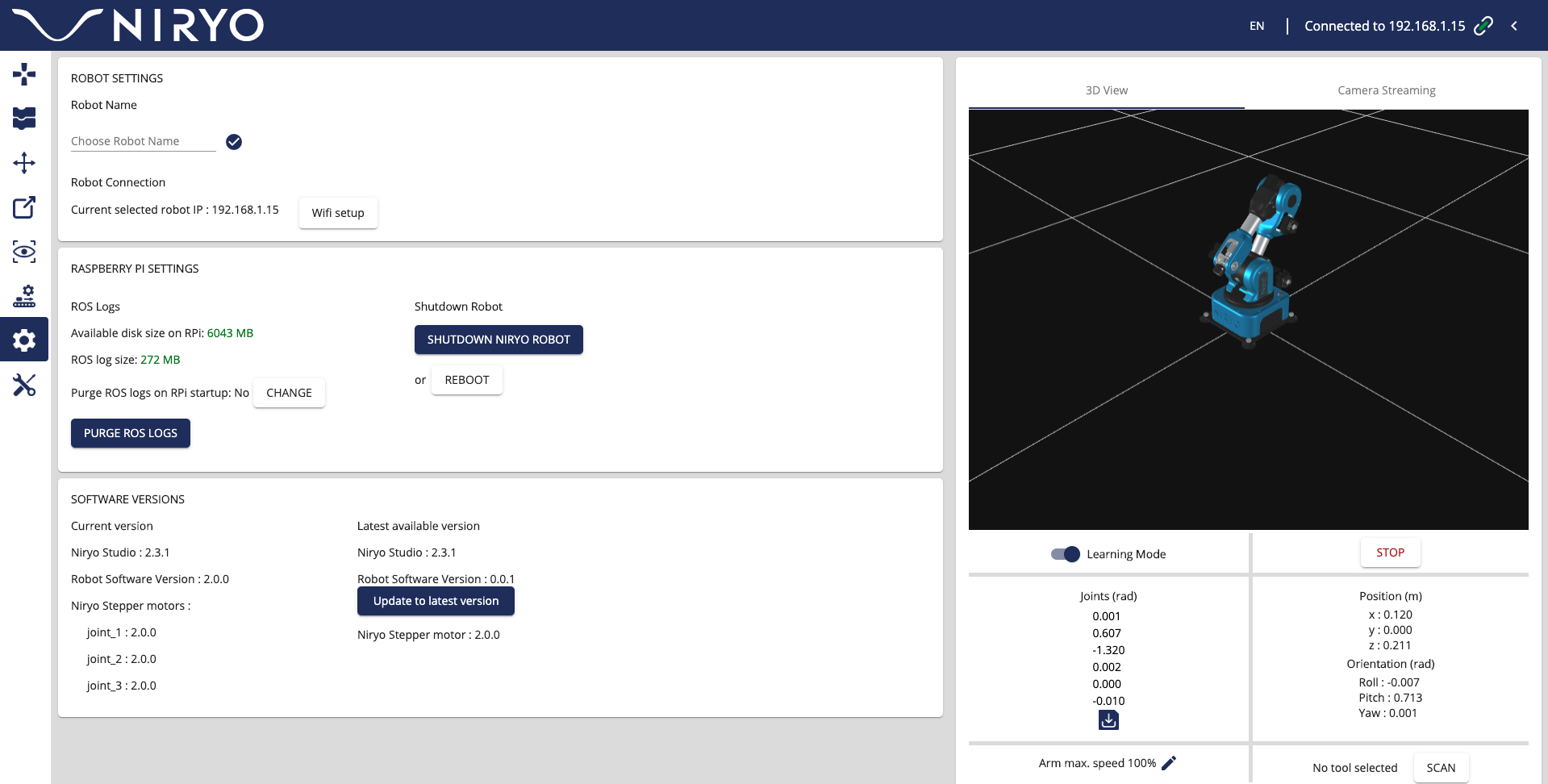
怎么控制奈德2?
开启 Ned2 的学习模式,手动定位,教它定位重现。控制 Ned2 就像按下按钮一样简单。
随着Niryo Studio,我们的免费桌面应用程序,使用块创建自己的roboctic程序。基于 Blockly(类似于 Scratch),我们的可视化编程界面使您无需任何编程知识即可快速轻松地创建机器人程序。
使用Arduino或Raspberry Pi通过其数字输入和输出(教程)控制 Ned。
用户:开发您自己的控制器(根据您的喜好和需求使用电脑鼠标、键盘、游戏控制器或 Leap Motion 控制 Ned),使用我们的API(Python、Modbus、TCP)直接或远程控制 Ned,或者直接进入开源的ROS 代码。
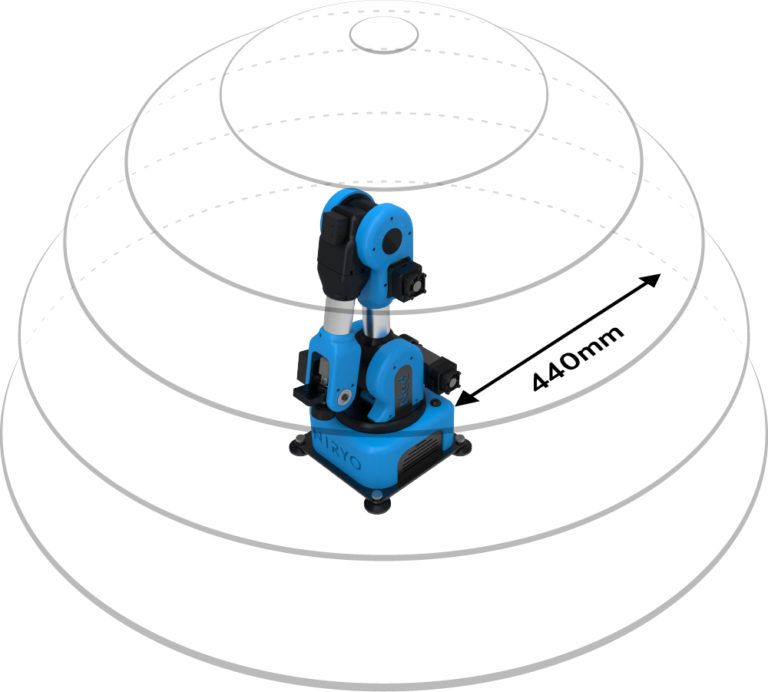
Niryo Ned2机械臂技术参数
提升负载: 300 克
工作范围 : 440 毫米
精度:+/-0.5mm *
重复精度:+/-0.5 毫米 *
底角:+/- 175°
电源:12伏特/7A
通信:
1 Gb/s 以太网
2.4GHz 和 5GHz WIFI - 802.11 b/g/n/ac
蓝牙 5.0 低功耗蓝牙
USB
接口/编程:Windows/MacOS/Linux(桌面应用程序)和APIs
消耗:~ 60 瓦
材料:铝、PLA(3D打印)
端口:1 个千兆以太网 + 2 个 USB 3.0 + 2 个 USB 2
电子产品:
树莓派 4
+ 3 x NiryoSteppers
+ 2 x Dynamixel XL - 430
+ 1 x Dynamixel XL - 320
碰撞检测传感器:磁性传感器(电机)