加载中
津发科技
ErgoSIM驾驶模拟仿真软件
详细说明
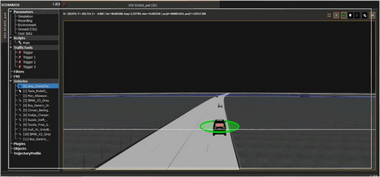
ErgoSIM驾驶模拟仿真软件是一个全面、开放和可扩展的平台,适用于交通驾驶与智能座舱领域研究,研究人员可根据具体研究需求,通过系统搭建适合的驾驶仿真场景并进行相应测试。系统通过模型在环(MiL)的仿真方式,采用软件在环(SiL)与硬件在环(HiL)的测试方法,使得用户可以使用驾驶模拟系统在驾驶模拟仿真环境中行驶。
此外,系统能够结合ErgoLAB人车路环境同步云平台,将搭建的模拟环境数据结合驾驶模拟器数据、主客观多模态人因数据,综合地进行分析,可用于对智能座舱系统设计、自动驾驶系统功能、驾驶员行为等进行测评。
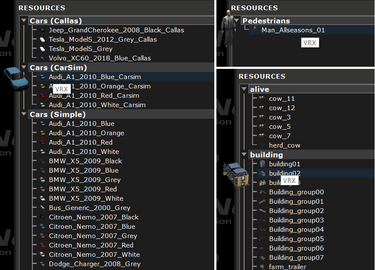
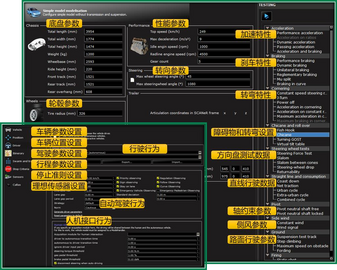
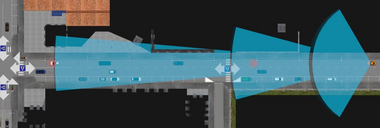
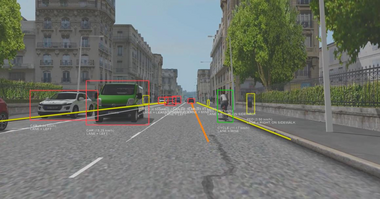
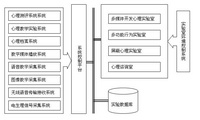
ErgoSIM驾驶模拟仿真软件内置丰富的场景模拟素材(例如道路模型、指示标志、过往车辆与行人、交通场景等),用户可以使用内置场景素材搭建自己需要的场景,还可以根据研究需求导入所需要的场景素材;用户可以根据自身研究需求搭建不同的场景,并且可以根据自身的需要从外部导入所需要的地图、标识等素材,完成实验场景的个性化定制;系统提供完整准确的多体车辆动力模型,具备多种参数设置,可以根据实验需求进行设置,同时,系统也可以将道路摩擦与风的影响纳入到模拟环境中;系统可以构建车辆传感器(相机、雷达、激光雷达等)的理想化几何模型,并能够提供地面的真实数据,例如车道、标志、目标等。此外,系统可以通过符合OSI模型的SDK进行输出,并能够对地面实施扰动。用户可以通过该模块开发与测试从感知中分离出来的规划与控制算法,并测试ADAS系统的鲁棒性。系统可以通过传感器驱动硬件接口实现转向力反馈,并且系统具有多屏幕视觉功能,可以提供极大的司机视野,此外,还可以结合多种眼动追踪系统对驾驶人员的行为进行监测。用户可以使用驾驶人在环(DiL)测试功能完成人机工效以及HMI智能座舱相关研究;用户可以通过该平台完成场景与交通状况的模拟、语义传感器模拟、汽车动力学模拟等;用户可以完成实时模式或离线模式的驾驶模拟,并且可以完成对于真实场景与虚拟场景的模拟,除此之外,还可以同步完成多种模型的模拟;用户可以通过系统研究车辆的表现以及探究情景参数、CALLAS车辆参数等对车辆行为的影响。结合ErgoLAB人机环境同步云平台,可以在驾驶任务过程中同步测试驾驶人员的多模态数据指标,例如生理、眼动、脑电等数据,通过测量的数据指标可以完成对于驾驶人员状态监测、注意力分配、认知与决策相关的研究,ErgoLAB人机环境同步云平台可人-机-环境多维度数据的同步采集与综合分析,包括眼动追踪、生理测量、生物力学、脑电、脑成像、行为、人机交互、动作姿态、面部表情、主观评 价、时空行为、模拟器、物理环境等,为科学研究及应用提供完整的数据指标。平台可完成完整的实验和测评流程,包括项目管理-试验设计-同步采集-信号处理-数据分析-人工智能应用-可视化报告,支持基于云架构技术的团体测试和大数据云管理。