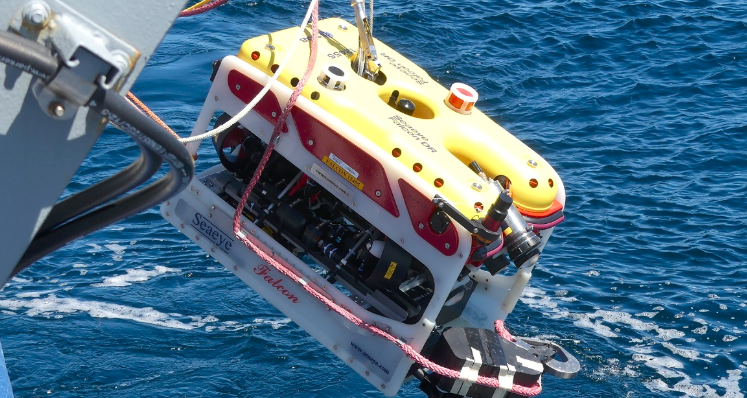
Falcon 型水下机器人系统功能用途:
1、 动态实时视频检测堤坝、船体水下结构体并保存视频图像
堤坝水下障碍物结构视频检测
船体水下结构视频检测
2、 堤坝、码头、桥梁水下结构体声纳图像检测和破损评估
水下坝体结构和栏污栅声纳图像检测
3、 水底淤积物取样和分布区域评估
水底沉积物视频图像
4、 水下障碍物搜寻、定位和提取
5、 配合潜水员进行水下目标物抓取、清洗等辅助工作
Falcon 型水下机器人系统设备主要性能:
水下潜器本体主机:
水下潜器本体主机采用高强度聚丙烯工程塑料框架结构,具有坚固、浮力大、易钻
孔和耐腐蚀的优点。系统结构采用的流体平衡性设计,合理的框架结构和浮力
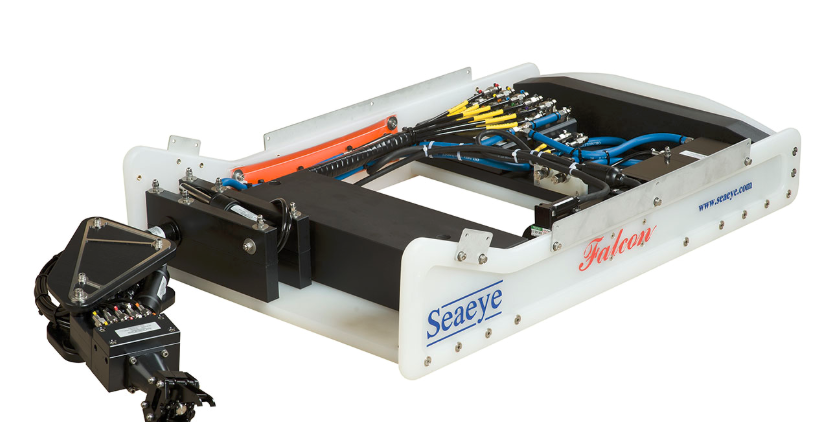
压载配比,保证系统在水下具备较强的稳定性和操控性;经久耐用的安装固定方式,
确保固定在主机上的摄像头、声纳等传感器的安全;系统主板采用功能接口模块化
设计,便于单元组件集成、更换和故障排查,很大程度上提升效率和降低成本;开放
式平台,灵活扩展多种功能组件,兼容声纳、USBL 水下声定位系统、高度计、机械
手、清洗刷、取样器等相关功能组件,实现在各种不同环境下的具体应用。 直流无
刷推进器: 5 推进器结构配置,其中 4 个水平矢量推进器,1 个垂直推进器。
Seaeye 从 1987 年开始使用无刷直流型主推进器技术,这种推进器带有速度反馈驱
动电路,对推进进行精确快速控制。结合固态速率陀螺,增强方向稳定性,并防止
航向改变过调节,使得 ROV 水下“飞行”变得简单容易。