
TC-Cgbot双臂机器人科教平台
产品概述:
TC-Cgbot是一款专注于室内应用研究的自主移动双臂机器人,可完美的应用于教育研究、健康护理以及智能家居等科研领域。Cgbot采用模块化设计,结构精巧,并配置有丰富的传感器和硬件接口,完全支持ROS系统,支持二次开发、可满足多种科研需求。

应用范围:
科学研究、教育教学、康复医疗、智能家居、生活娱乐等。
产品结构:
Cgbot机械结构主要由移动底盘、可升降躯干、头部云台和两条机械手臂组成。
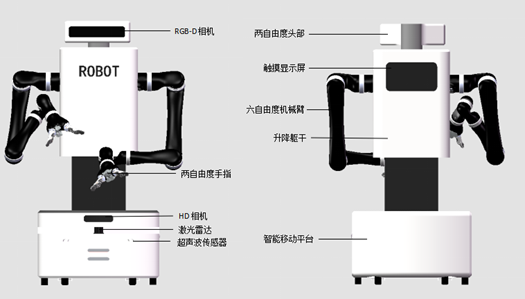
Cgbot结构说明图(图片仅供参考)
移动底盘:
使用高性能伺服电机,设计有减震结构,底盘配置有高精度激光雷达、超声波传感器、惯性测量单元、相机等传感器,可满足室内环境下机器人定位、建图、自主导航、避障、越障、上坡等各方面的需求。
移动底盘规格参数表 | |
负载 | 50kg |
尺寸 | 直径560mm,高度340mm |
速度 | 1.2m/s |
电动机 | 2x250W伺服电机(12位增量型磁电编码器反馈) |
减速比 | 1:15 |
脚轮 | 4个 |
减震器 | 2个 |
驱动方式 | 差速驱动 |
主动轮直径 | 160mm |
越障性能 | 可越过间隙20mm,可越过台阶10mm |
升降躯干:
使用同步带和滚珠丝杠结构带动机器人头部和机械臂进行上下运动,具有350mm范围行程,采用多圈值编码器反馈,使机器人可在不同高度空间内进行作业,极大的扩展了机器人的工作空间。
升降机构规格参数表 | |
行程 | 330mm(350mm可选) |
速度 | 0.25m/s )) |
定位精度 | ±0.01mm |
承载 | 35kg |
驱动电机 | 750W伺服电机(多圈16位值编码器) |
传动方式 | 同步带+滚珠丝杠 |
传动比 | 1:1 |
丝杠导程 | 5mm |
头部云台:
使用高精度伺服电机,具有两自由度,可带动头部相机进行旋转和俯仰运动,头部视觉系统可帮助机器人完成目标识别、人脸侦测、物体抓取等任务。
头部云台规格参数表 | |
自由度 | 2DOF |
俯仰范围 | -90?~60? (可扩展) |
旋转范围 | ±90?(可扩展) |
定位精度 | ±0.1? |
驱动电机 | 2x200W以上伺服电机(12位单圈磁性值编码器反馈) |
运动速度 | 1.5rad/s |
机械手臂:
Cgbot具有两条JACO27自由度机械臂,可进行双臂协同作业;
JACO2系列机械臂采用模块化设计,无需控制柜,设计轻巧、便携,控制简单,拥有良好的安全性和人机交互性,在众多科研领域及医疗康复领域有着广泛应用。
机械臂各关节没有运动范围限制,腕关节十分灵活,装配有仿人指夹爪,可轻松完成各种抓取动作。
机械臂规格参数表 | |
自由度 | 7DOF |
自重 | 5.5kg |
负载 | 2.4kg mid-range,2.1kg full extension |
臂展 | 985mm |
线速度 | 0.2m/s |
关节旋转范围 | 无限制 |
定位精度 | 笛卡尔坐标下的定位精度≤1mm,关节角度的精度≤0.5° |
关节传感器 | 电流、位置、温度、力矩、3轴加速度 |
平均功率 | 25W |
可选夹爪 | 2指/3指 |
夹爪抓力 | 60N |
主要硬件配置:
传感器:
Cgbot配备多种高性能传感器,包含激光雷达,超声波传感器、IMU、深度相机等。
激光雷达具有扫描范围广、精度高、重量轻、功耗低等优点,可用于地图构建、定位和导航等方面;
底盘前后各安装有两个超声波传感器,可减小机器人测距盲区,满足机器人近距离避障需求;
IMU模块集成高精度的陀螺仪、加速度计、地磁场传感器,采用先进的滤波算法,能够快速求解出机器人当前运动姿态,辅助机器人进行实时定位;
深度相机为机器人提供当前环境下彩色和深度信息,可用机器人避障、视觉SLAM等领域;
此外,机器人底盘上还安装有一个高清相机,可供远程视频监控使用。
主要传感器规格参数表 | ||
激光雷达 | 型号 | HOKUYO UTM-30LX |
数量 | 1 | |
安装位置 | 底盘 | |
扫描距离 | 0.1m-30m (Max.60m),270? | |
测量精度 | ±30mm | |
角度分辨率 | 0.25?(360°/1440 steps) | |
扫描频率 | 40Hz | |
激光安全等级 | 1级(FDA) | |
超声波传感器 | 型号 | P+F UC500 |
数量 | 4 | |
安装位置 | 底盘前后各两个 | |
检测范围 | 0.03m-0.5m | |
测量精度 | 0.1mm | |
温度补偿 | 有 | |
IMU | 型号 | 北微BW-AH300 |
数量 | 1 | |
安装位置 | 底盘 | |
自由度 | 9DOF | |
航向精度 | 0.8? | |
校准 | 硬铁校准、软铁校准、有限倾斜用户校准 | |
输出频率 | 50Hz | |
深度相机 | 型号 | Orbbec Astra |
数量 | 1 | |
安装位置 | 头部 | |
深度范围 | 0.6m-8m | |
精度 | ±3mm | |
FOV | 彩色:H 63.1?,V49.4?;深度:H 58.4?,V 45.5? | |
帧频 | 30FPS | |
高清相机 | 型号 | 普通摄像头或鱼眼摄像头(可选) |
数量 | 1 | |
安装位置 | 底盘 | |
硬件扩展接口:
Cgbot提供USB2.0/3.0,VGA、HDMI、COM、千兆网口等多种扩展接口,支持RS232/485和Modbus通信,方便用户进行二次开发调试使用。
控制系统:
ROS系统:
Cgbot控制系统使用基于ROS的开源架构,ROS开源操作系统具有良好的组织架构和丰富的开发工具,为机器人开发提供了广阔的空间,被广泛的应用于机器人开发。
人机交互:
Cgbot提供丰富的人机交互方式,支持语音交互、远程控制、本体触摸控制等方式。
1.语音交互,采用4MIC直线麦克风,可在5米范围内实现360度声音采集,并为用户提供科大讯飞语音识别方案;
2.远程控制功能,可实现远程视频监控和对机器人的远程运动控制;
3.机器人背部安装触摸操作板,方便用户直接对机器人进行操作;
4.此外,Cgbot还支持用户使用手机或平板操作机器人。
电气系统
机器人采用48V锂电池供电,电池管理模块装有防过流、短路、断路等异常的管理模块,保证电池充电、供电的安全性。
机器人系统采用Cortex-M4内核ARM芯片作为机器人电源管理模块,该模块实现对驱动系统、传感系统、主处理器系统采用隔离电源分布式供电,保证各系统间独立稳定的电气供电,防止相互间信号串扰。
超声波传感、防碰撞传感、紧急按键等,实时性要求较高的信号,均由电源管理模块进行统一处理,满足关键信号实时性要求。
各类模块间,采用485/CAN总线式通信,满足机器人各模块间大数据、多节点通信要求,同时便于后续模块的扩展、升级。
电池性能:
规格:48V 30AH锂电池;
自放电率:月自放电率≤3%,持久锁存电量;
工作温度范围:-25℃至50℃;
充电时间:4至6小时;
保护板:须拥有过充保护、过放保护、短路保护、过流保护、过温保护、均衡保护。
软件开发:
支持功能:
Cgbot已实现SLAM、自主导航、物品抓取、远程操作、人机交互等各项功能,用户无需额外做任何配置,开箱即可使用。Cgbot自带SLAM功能建图面积可达1万平米,并具有厘米级导航定位精度,具备自主避障能力,可以满足各类情况下的室内移动。双机械臂可以协同作业,抓取和呈递水杯、书本、手机等常见物品;远程操作功能支持用户远程控制机器人运动,并进行视频监控。
技术参数汇总:
机器人本体 | |
高度 | 1200mm-1550mm(行程350mm,可选330mm) |
重量 | 约90kg |
自由度 | 23 DOF(7 DOF手臂*2,2 DOF夹爪*2,2 DOF头部, 2 DOF底盘,1 DOF升降躯干) |
速度 | 直线1.2m/s,旋转1.5rad/s |
底座尺寸 | 约直径560mm,高度340mm |
越障性能 | 可越过10mm台阶、20mm沟槽、5度斜坡 |
头部运动范围 | 俯仰:-90?~60?,旋转±90? |
续航能力 | 6h持续移动 |
电池 | 48V@30AH |
电动机 | 全部伺服电机 |
触摸显示屏 | 10.1寸液晶显示屏(安装在躯干背部) |
立体声麦克风 | 一套(安装在躯干) |
机械手 | |
数量 | 2 |
单臂负载 | 2.0kg |
单臂臂展 | 985mm |
单臂自由度 | 7 DOF |
速度 | 0.2m/s |
关节旋转范围 | 无范围限制 |
关节传感器 | 电流、位置、力矩、温度、3轴加速度 |
控制方式 | 力矩、位移或速度控制 |
末端执行器 | 仿人指夹爪,三指或两指(可选) |
传感器 | |
激光雷达 | HOKUYO UTM-30LX,检测距离30m(可选) |
超声波传感器 | 检测距离0.5m;前后各2个 |
RGB-D相机 | 检测范围:0.6m-8m,彩色FOV H63.1' V49.4’,深度FOV H58.4' V45.5' |
IMU | 9 DOF |
高清相机 | 1个 |
无线通信 | |
蓝牙4.0 | 支持 |
WIFI | 支持 |
3G/4G | 支持 |
扩展接口 | |
USB2.0/3.0 | 4个 |
VGA | 1个 |
HDMI | 1个 |
COM | 3个 |
LAN | 2个 |
PC | |
处理器 | 四核心英特尔? 至强? /酷睿?i7处理器 (Kaby Lake-S/Skylake-S) |
芯片组 | |
内存 | 32GB |
硬盘 | 1T+128GB固态硬盘 |
软件 | |
操作系统 | Ubuntu Linux LTS |
ROS | 支持 |
支持功能 | SLAM、自主导航、语音识别、物品抓取呈递、视觉识别、双臂协作、 远程操作、Gazebo仿真、人机交互等功能 |
二次开发 | 支持 |
附件 | |
平板电脑 | 一套 |
无线手柄 | 一套 |
电源适配器 | 一套 |
充电桩 | 一套 |
二次开发工具 | 开发系统U盘、无线键鼠套装、HDMI连接线、USB转串口线,各一套 |







