




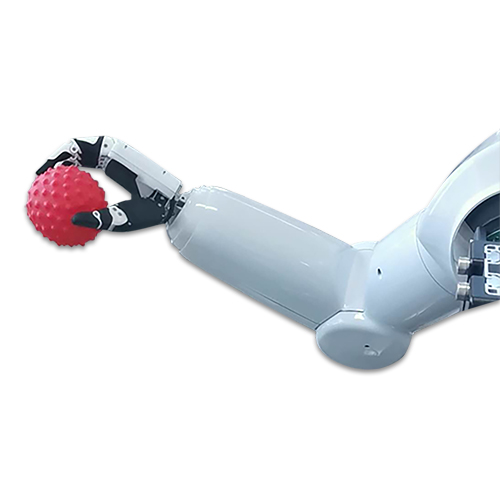
产品介绍
ROBOROT ARM PRO仿人机械手臂共有11自由度。其中:臂有6个自由度,手有5个自由度,手指采用直驱伺服电机驱动方式,更符合人体构造原理,外观简洁、结构精巧。机械臂采用自主研发的一体化伺服关节,结构紧凑,不仅可以实现用户对长时间演示体验的需求,还可以做一些实物抓取项目,配合新一代的运动姿态捕捉服,使得机械手臂动作更加方便、灵活。
功能描述:
1、写功能:机械臂根据给出的各个关节转角转动;
2、读功能:机械臂主控可读出当前状态各个关节的转角,以十进制返回;
3、函数封装(关节角度/电机角度),用户直接调用;
4、录制动作组(可供机械臂录制八个动作组,方便用户进行演示操作)。
参数一览:
机械手 | 机械臂 |
l 关节总数: 12个 l 自由度: 5DOF l 力传感器: 5个 l 力传感器分辨率:0.5N l 指尖重复定位精度:0.2mm l 四指握力: 0-10N l 拇指之间握力: 0-15N l 工作电压: 6-8.4V l 静态电流: 0.31A l 空载运动平均电流:1.5A l 握力抓取: 5A l 通讯接口:RS232/RS485/CAN | l 自由度: 6DOF l 重量: 约4kg l 负载能力: 约1Kg l 末端控制精度:0.5mm l 重复定位精度:1mm l 单侧手臂总长: 680mm l 有效工作半径:300mm l 平均/大功率:约25W(待机5W)/约50W l 关节转速:180°/s(1-5)360°/s(6手腕) l 关节范围: 0°~180°/ 0°~90° l 外壳材质:ABS(喷漆颜色可定制) l 骨架材质: 6061-T6铝合金 l 控制方式:TTL串口、体感服(选配) l 供电要求:24V DC10A l 设计总寿命:3000小时 |
![]()






