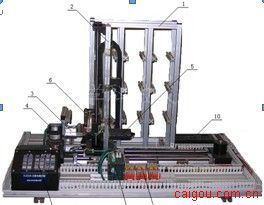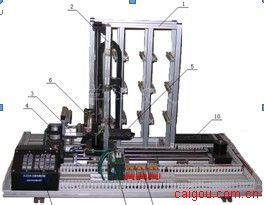
该模型模拟自动化生产过程中,仓储环节的微缩模型,使用PLC、传感器、位置控制、步进控制和电气传动等技术,具有货物的自动提取和存放功能,也可配置监控软件由上位计算机监控。该装置采用台式结构,由立体库位框架、巷道式高叉车、操作显示盘组成,并配有控制器(PLC)、传感器(光电式、触点式)、步进电机、直流电机、键盘、传动系统等,构成典型的机电一体化教学模型。
一、 技术指标:
1. 电源:AC220V
2. 外形尺寸:800×500×500 单位(mm)
3. 库位尺寸:115×85×100 单位(mm)
4. 材料:基板、库位均为铝合金型材,其它零件均为数控板金成型
5. I/O:输入:17点 输出:6点
二、 技术特点:
1. 自动巷道叉车(磁力机械保护)
2. 双向库位设计,9库位(3层3列)
3. 通过按键或触摸屏(选配),实现手动、自动控制
4. I/O信号电源光耦隔离,24V/5V自适应
5. 可支持多种控制器:PLC(AB、西门子、三菱、松下、欧姆龙);I/O板卡
三、实验内容:
1. 电机及拖动原理。
2. 光反射式工业传感器的原理及应用。
3. 自动仓储系统在工业生产中的作用及应用。
4. 自动仓储系统控制方案的设计与实现。
5. 工业自动控制系统的组成及结构原理。
6. 可编程控制器(PLC)的原理及结构
7. PLC的编程训练及应用。
8. PLC的调试及运行。
9. 自动控制系统的调试及运行。
10. 机电一体化设备的使用及维护。
四、结构说明
1. 立体框架式库位
2. 三维运动叉车
3. 货叉
4. 水平运动电机
5. 进出移动电机
6. 垂直运动电机
7. 操控盘
8. 控制器
9. 电机驱动板
10. 直流电源