一、 简介
机器人作为机电系统创新设计实践教学来说是个非常好的载体,能够开阔学生眼界,培养创新设计能力、分析问题解决问题能力、实践动手能力。
清华大学研制与开发了可供学生独立创新设计的多自由度可重构教学机器人平台,设计了模块化的机器人结构,使其具有可重构的灵活性,限度地让学生发挥想象创新空间,同时设计开发了开放式的控制卡和控制软件、开放式的软件编程环境,使学生能够通过主动参与并完成复杂的多种构型的机器人创新设计实验。该平台不仅可用于机器人技术的实践教学,还可作为机械工程及自动化学科的创新设计实践教学平台。
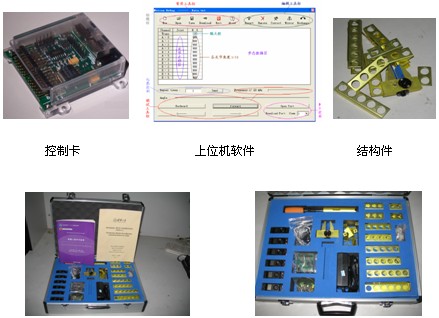
二、 组成
1、 六个航模舵机、几十个机械零部件,可组成多种模块化关节结构;
2、 基于单片机的机器人多关节控制卡,可控制12个电机,并预留8个I/O口用于用户的拓展使用;
3、 串口线(1根)、电源适配器
4、 机器人教学控制软件MotionDebug1.01;
5、 光盘(软件、多种构型实例录像、实验课件);
6、 实验指导书(1册)
该教学机器人可开设出多个教学实验,如多自由度关节式机器人组装及编程实验、机器人机构创新设计搭建与分析、机器人多关节协调控制与编程实验等等。机器人既可使用电源适配器进行外接电源,也可将程序下载后,使用电池进行自主运行。软件设计具有开放性和可介入性,灵活性好,为机械工程及自动化系统创新设计提供了综合实践教学平台,对高校学生创新意识的培养和实践能力的提高具有重要意义。
一、 基本实验内容
1、机器人单关节控制实验
2. 简单机械结构装配实验
3. 机器人零点标定实验
4. 多自由度手臂机器人搭建实验
5. 机器人运动学建模实验
6. 机器人轨迹规划实验
7. 机器狗搭建及行走实验
8. 多关节机器狗搭建及行走实验
9. 蛇形机器人运动规划实验
10. 海星形机器人运动规划实验
11. 六足机器人运动规划实验
12. 双足机器人运动规划实验
13. 创新结构设计与搭建实验
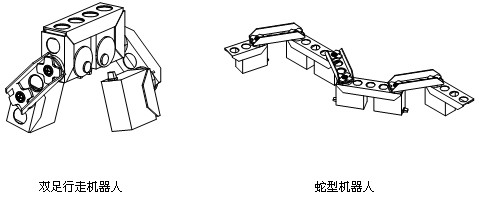
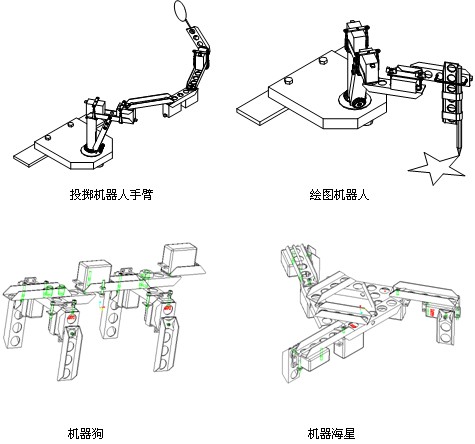
二、 典型机器人构型设计实例(部分)
各种构型:



一、 应用
1、 可为高校机器人技术类教学提供实验平台;
2、 可为高校机电系统创新设计提供实践教学平台;
3、 可成为学生毕业设计的实验平台;
4、 可基于该平台开发新的创新型教学实验。